들어가며
BMS 펌웨어 일을 주로 해왔는데 최근에 모터 제어 건이 하나 들어왔다. 고객이 지정한 컨트롤러는 maxon ESCON 50/5인데, 붙여야 할 모터는 maxon 제품이 아니라 국산이다. 모터뱅크의 BL57101E1K, 감속기는 PGH56S.
ESCON은 maxon 모터에 맞춰 설계된 물건이라 국산 BLDC를 물리면 사양서와 실제값이 안 맞는 경우가 종종 있다. 국내에 한국어 자료도 거의 없어서 삽질한 내용을 정리해 둔다.
하드웨어 구성
| 구성 | 제품 | 주요 사양 |
|---|---|---|
| 서보 컨트롤러 | maxon ESCON 50/5 (#409510) | 50V, 연속 5A / 피크 15A |
| BLDC 모터 | 모터뱅크 BL57101E1K | 24V, 200W, 57각, Hall + 1000CPR 엔코더 |
| 감속기 | 모터뱅크 PGH56S | 1단 유성, 1:16, 백래시 15arcmin |
| 제어 MCU | STM32 (예정) | PWM + GPIO로 속도/방향 제어 |
모터 사양서
모터뱅크에서 같이 준 BL57101E1K 사양서다.
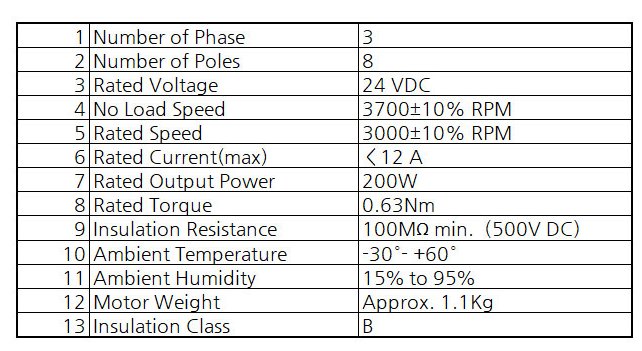
찾아볼 값만 추리면 이 정도.
- 3상, 8폴 (사양서 표기) — 실제 pole pairs는 뒤에서 뒤집힌다
- 정격 전압 24 VDC
- 무부하 속도 3700 ±10% RPM
- 정격 속도 3000 RPM
- 정격 토크 0.63 Nm
- 정격 출력 200 W
- 정격 전류 12A 이하
감속기 사양

PGH56S16은 56mm 플랜지 1단 유성 감속기. 감속비 1:16, 효율 94%, 백래시 기본 60 arcmin 이하, 고정밀 옵션은 15 arcmin.
사양서를 그대로 믿지 말 것
이 포스트에서 가장 먼저 짚어두고 싶은 건 이거다. 국산/중국산 BLDC는 사양서 값과 실측값이 어긋나는 경우가 꽤 있다. 이번에도 두 군데가 달랐다.
| 항목 | 사양서 | 실제 (ESCON 실측) |
|---|---|---|
| 극수 (Pole Pairs) | 4 (8폴) | 2 (4폴) |
| 엔코더 분해능 | 1000 CPR | 500 CPR |
왜 그런지는 아래에서 하나씩 푼다. 다행인 건 ESCON의 Diagnostics 툴이 이 차이를 자동으로 잡아준다는 점이다.
Startup Wizard
ESCON Studio 실행하면 Startup Wizard가 뜬다. 총 18단계인데 주요 화면만 본다.
Motor Data
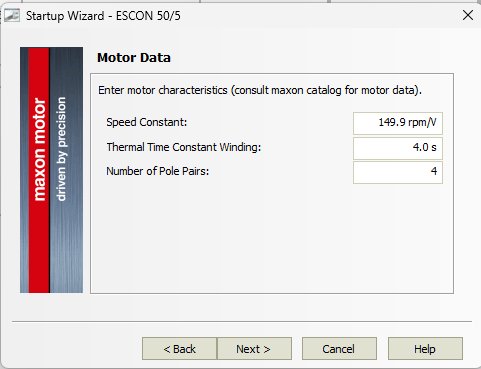
- Speed Constant: 149.9 rpm/V
- 무부하 3700 rpm ÷ 24V ≈ 154 rpm/V. IR 강하 고려해서 살짝 낮춰 잡았다.
- Thermal Time Constant Winding: 4.0s
- 정확한 값 모를 때는 보수적으로. 57각 200W급이면 보통 30s 정도 쓸 수 있지만, 이후에 Current Limit을 낮게 잡을 거라 짧게 둬도 안전하다.
- Number of Pole Pairs: 4
- 사양서대로 넣음. 나중에 2로 바뀐다.
System Data
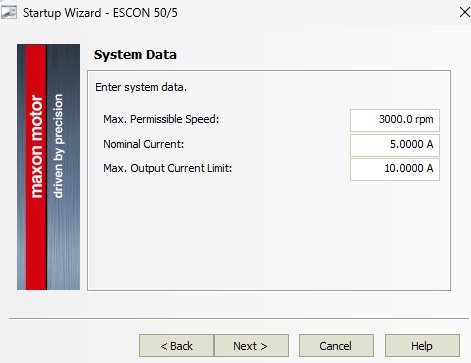
- Max. Permissible Speed: 3000 rpm
- 실제론 4000 rpm 정도 여유를 두는 게 낫다.
- Nominal Current: 5.0 A
- ESCON 50/5의 연속 정격이 5A라 여기에 맞췄다. 모터는 8.3A까지 견디지만 컨트롤러 쪽이 병목이다.
- Max. Output Current Limit: 10.0 A
이 단계에서 ESCON 50/5가 이 모터에 좀 작다는 게 드러난다. 고부하 연속 운전이면 70/10이 정답인데 저부하 테스트용이라 50/5로 충분하다.
Detection of Rotor Position
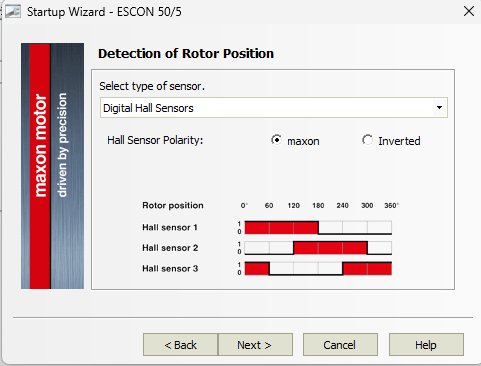
- Sensor Type: Digital Hall Sensors
- Hall Sensor Polarity: maxon
국산이라 Polarity가 maxon 표준과 다를 수 있지만 일단 기본으로 두고 Diagnostics에서 확인하는 흐름.
Speed Sensor
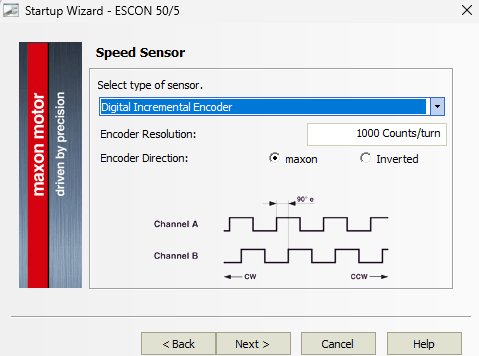
- Sensor Type: Digital Incremental Encoder
- Encoder Resolution: 1000 Counts/turn
- Encoder Direction: maxon
여기서 주의할 건, ESCON이 내부적으로 4체배(quadrature decoding)를 자동 적용한다는 점이다. 사용자는 엔코더 원래 분해능만 넣으면 되고 4000을 직접 넣으면 안 된다.
Enable 모드
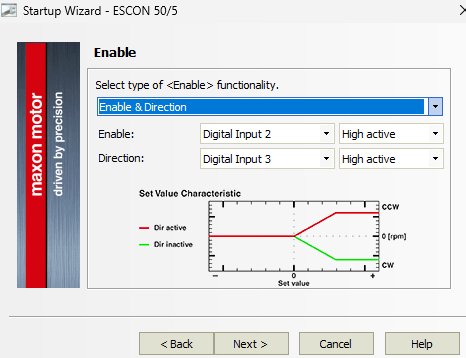
- Functionality: Enable & Direction
- DI2: Enable (High active)
- DI3: Direction (High active)
Enable 모드는 네 가지 중에 고르게 된다.
| 모드 | 특징 | 용도 |
|---|---|---|
| Enable | 1핀, 양극성 Set Value | 가장 단순 |
| Enable & Direction | 2핀, 단극성 Set Value | 공장 HMI 스타일 (이번 선택) |
| Enable CW & Enable CCW | 2핀, 방향별 Enable | 리미트 스위치 인터록 |
| Enable & Stop | 2핀, 제어된 감속 정지 | 의료기기 같은 안전 응용 |
사람이 타는 기기(Smart Rollator 같은)에는 Enable & Stop도 좋은 선택이다.
Set Value (PWM)
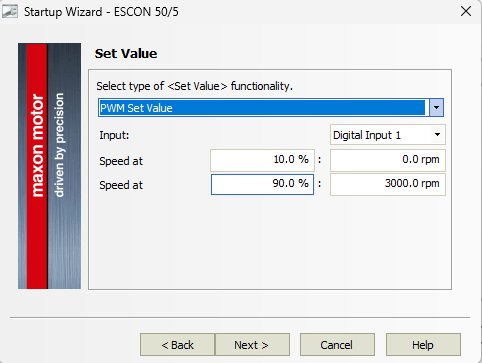
- Functionality: PWM Set Value
- Input: Digital Input 1
- Speed at 10% duty: 0 rpm
- Speed at 90% duty: 3000 rpm
STM32 타이머 PWM 출력을 ESCON DI1에 바로 물릴 계획이라 PWM 모드로 잡았다. 10~90%로 여유를 두는 건 안전 설계 관행이다.
0%/100%를 안 쓰는 이유는 단순하다. 0% duty는 “신호 없음"과 구분이 안 된다. 케이블이 끊겼거나 MCU가 부팅 안 된 상태랑 같은 출력이 나와버린다. 100% duty도 마찬가지로 “고정 High"랑 못 가린다. 10~90%만 쓰면 양 끝값이 에러 신호가 된다.
Current Limit / Speed Ramp
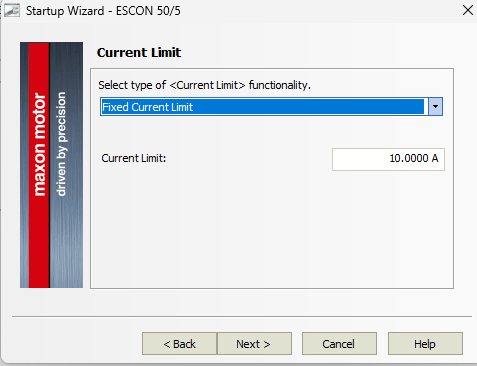
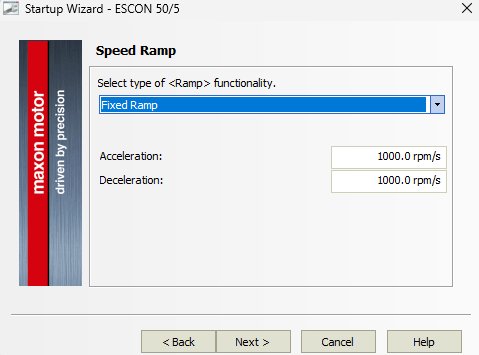
- Current Limit: Fixed, 10.0 A
- Acceleration / Deceleration: 1000 rpm/s (0 → 3000 rpm에 3초)
초기 실험이니 보수적으로. 의료기기처럼 부드러운 가속이 필요한 응용엔 이 정도가 맞고, 일반 서보면 3000~5000 rpm/s로 올려야 한다.
Offset
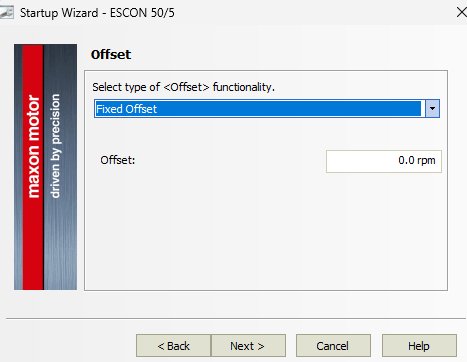
Fixed Offset 0.0 rpm. 처음엔 0으로 두고 실제 운전에서 Set Value가 0인데 모터가 미세 회전하면 그때 보정한다.
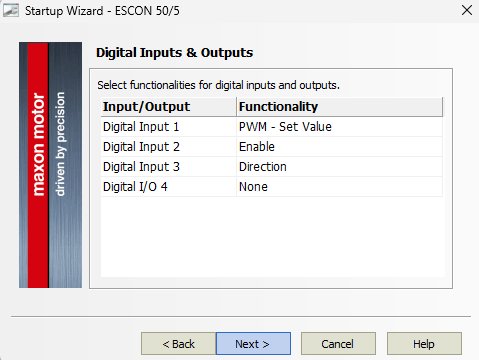
Digital I/O
| 핀 | 기능 |
|---|---|
| DI1 | PWM Set Value (MCU PWM) |
| DI2 | Enable (MCU GPIO) |
| DI3 | Direction (MCU GPIO) |
| DI/O4 | None (예비) |
DI/O4에 Ready 출력을 할당하면 MCU가 ESCON 에러 상태를 바로 감지할 수 있어 안전 응용에 유용하다. 이번엔 비워 뒀다.
Analog I/O
Analog 입력은 다 None(PWM 쓰니까).
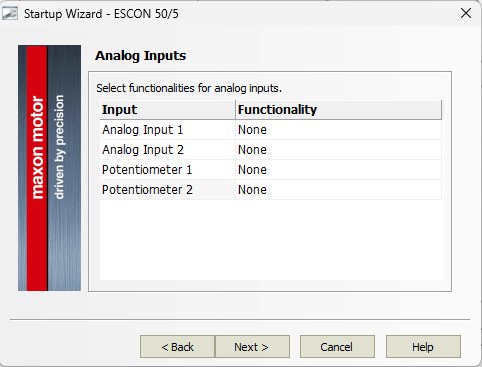
출력은 디버깅/모니터링에 쓴다.
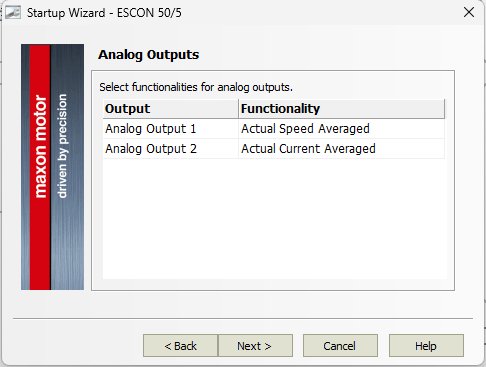
- AO1: Actual Speed Averaged
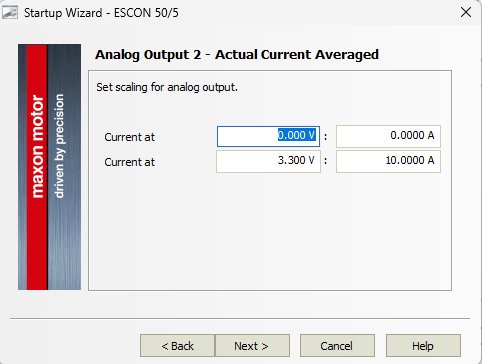
- AO2: Actual Current Averaged
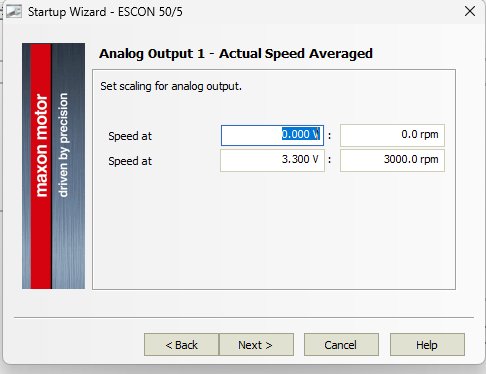
- AO1: 0.000V → 0 rpm / 3.300V → 3000 rpm
- AO2: 0.000V → 0 A / 3.300V → 10 A
최대값을 3.3V에 맞춘 건 STM32 ADC 레퍼런스가 3.3V라 풀스케일을 꽉 채우기 위함이다. 12bit ADC 기준으로 속도 분해능은 대략 0.73 rpm/LSB, 전류는 2.4 mA/LSB 나온다.
Configuration Summary
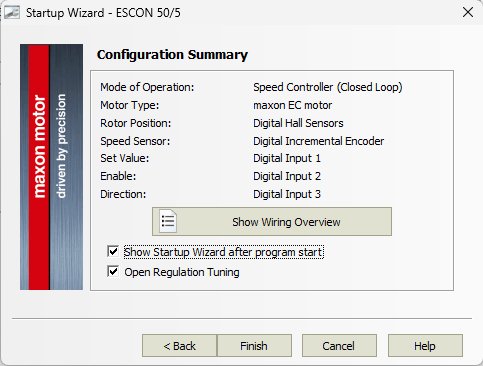
모든 설정이 한 화면에 요약된다. 여기서 Show Wiring Overview 버튼은 꼭 눌러 배선도를 캡처해 두자. 실제 배선할 때 없으면 고생한다.
Diagnostics — 실제 문제는 여기서 드러난다
Startup Wizard 끝내고 바로 Auto Tuning을 돌리면 안 된다. Diagnostics로 배선과 센서 방향을 먼저 검증해야 한다. 국산 BLDC 붙였을 때 이상한 건 이 단계에서 대부분 걸린다.
System Configuration
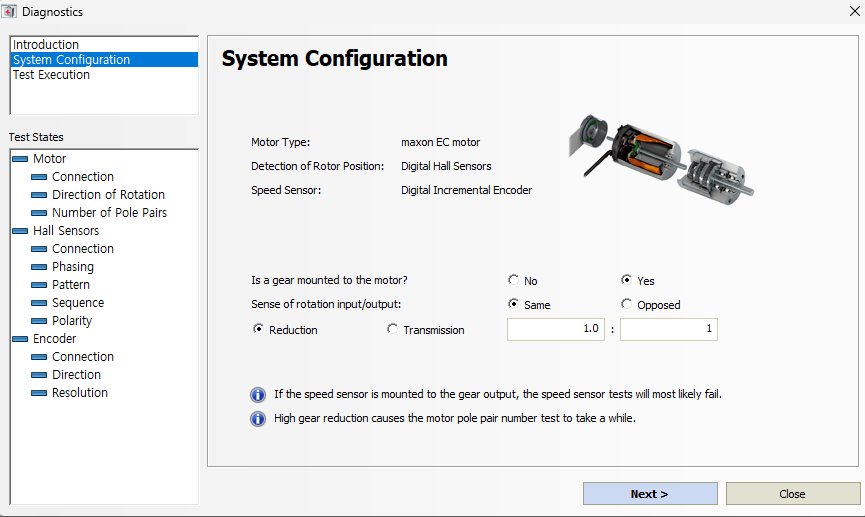
기본 화면이다. 감속기 정보를 정확히 넣어야 한다.
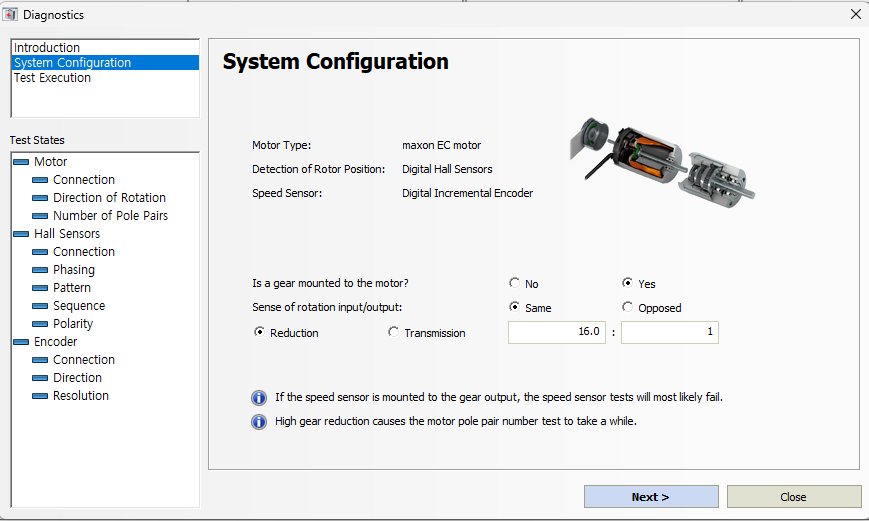
- Is a gear mounted to the motor?: Yes
- Sense of rotation: Same
- Reduction: 16.0 : 1
PGH56S는 1단 유성이라 모터 회전과 출력 회전 방향이 같다(Same). 감속비 16:1을 정확히 넣지 않으면 Pole Pairs 테스트가 엉뚱한 결과를 낸다.
하단에 “speed sensor가 감속기 출력에 장착되어 있으면 테스트 실패 가능"이라는 경고가 뜨는데, BL57101E1K는 엔코더가 모터 뒷단에 붙어 있어서 해당 사항 없음.
Test Execution
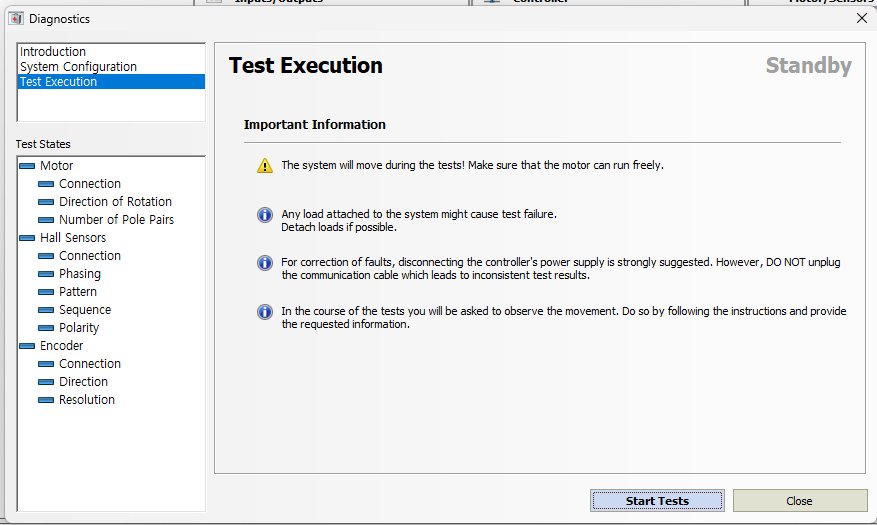
Standby 상태에서 Start Tests 클릭. 11개 항목을 순차 자동 검증한다. 도중에 모터가 스스로 회전하니 안전 공간 확보가 중요하다. 축에 무거운 게 물려 있으면 떼놓는 게 낫다.
Motor Direction of Rotation Failed
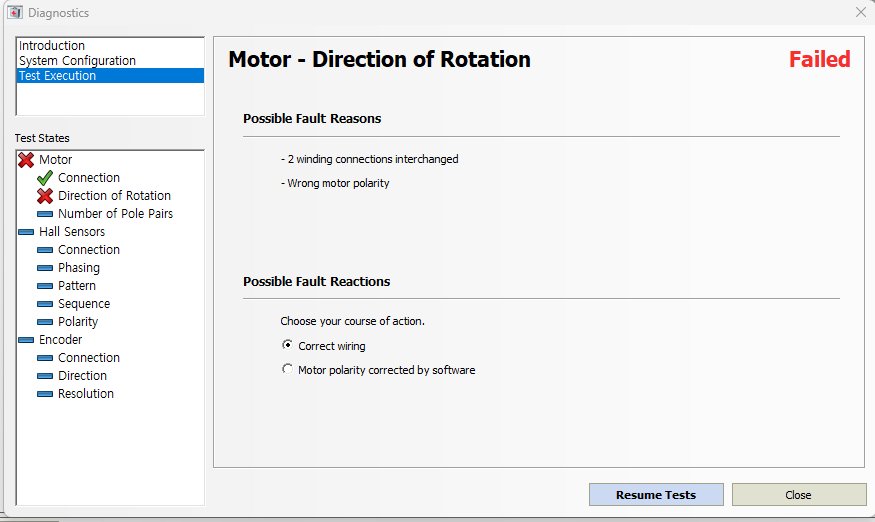
첫 번째 실패. 에러 메시지는 이거다.
Possible Fault Reasons:
- 2 winding connections interchanged
- Wrong motor polarity
BL57101E1K의 3상 권선 극성 정의가 maxon 표준과 달라서 그렇다. 국산 BLDC에선 흔한 일.
해결 선택지는 두 가지.
- Correct wiring: 전원 끄고 3상 중 2개 선을 바꿔 다시 물린다
- Motor polarity corrected by software: 소프트웨어로 뒤집는다
소프트웨어 보정을 선택했다. 배선 재작업 없이 바로 해결되고, 나중에 다른 모터 다룰 때도 동일한 방식으로 일관성을 유지할 수 있다. Resume Tests.
Number of Pole Pairs Failed
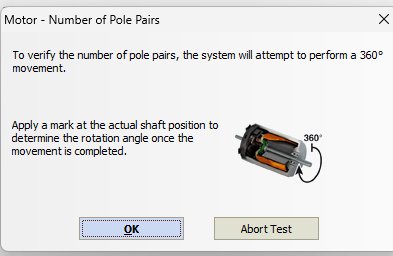
극쌍 수 검증은 사용자가 관여하는 테스트다. 모터축에 마크를 붙이고, 전기적으로 360° 회전 명령이 갔을 때 기계적으로 실제 몇 도 돌았는지를 관찰해야 한다.
4 pole pairs면 1/4 회전(90°), 2 pole pairs면 1/2 회전(180°)이 정상.
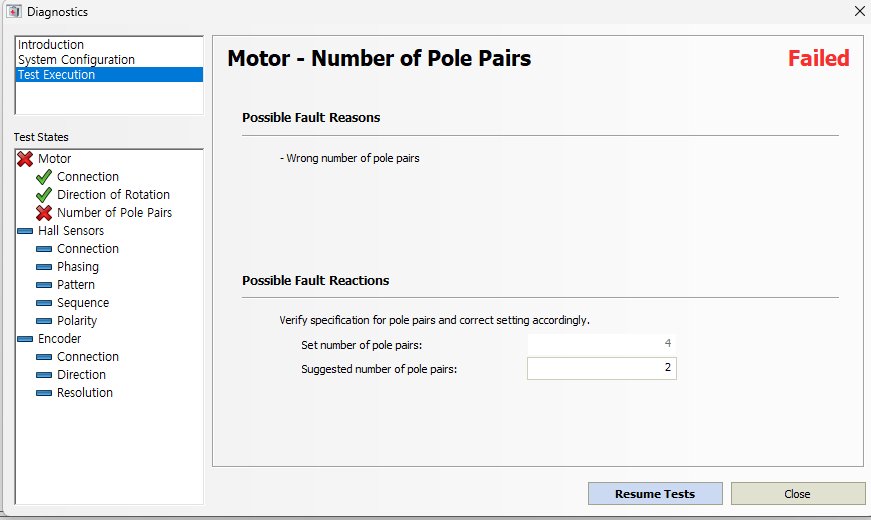
결과.
Set number of pole pairs: 4 (사용자 입력)
Suggested number of pole pairs: 2 (ESCON 실측)
사양서엔 “3상 8폴"이라고 적혀 있는데 실제로는 4극(2 pole pairs)이다. 사양서 표기 관행의 차이다.
BLDC 쪽 극수 표기는 제조사마다 통일이 안 돼 있다.
| 표기 | 의미 | Pole Pairs |
|---|---|---|
| “8 Poles” (전체 극 수) | N 4개 + S 4개 | 4 |
| “8 Poles” (한 극성만) | N극만 8개 | 8 |
| 실제 BL57101E1K | ESCON 실측 | 2 |
무부하 3700 rpm이라는 속도를 생각하면 4극(2 pole pairs)이 물리적으로도 자연스럽다. 극수가 많을수록 토크는 세지고 속도는 느려지는 쪽으로 가는데, 이 모터는 속도가 꽤 빠른 편이다.
2로 수정하고 Resume.
Encoder Direction Failed
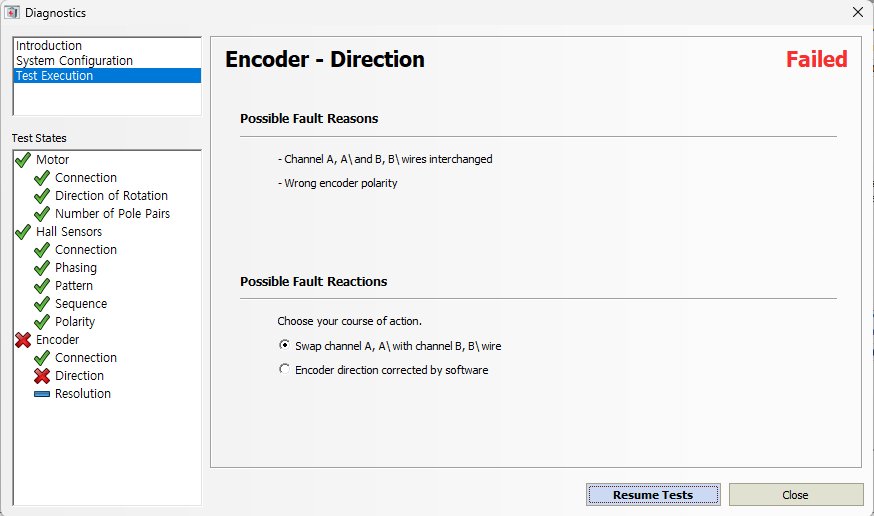
Motor polarity를 소프트웨어로 뒤집었더니 이번엔 엔코더 방향이 반대가 됐다. 예상된 부작용이다.
똑같이 Encoder direction corrected by software로. 일관성 있게.
Encoder Resolution Failed
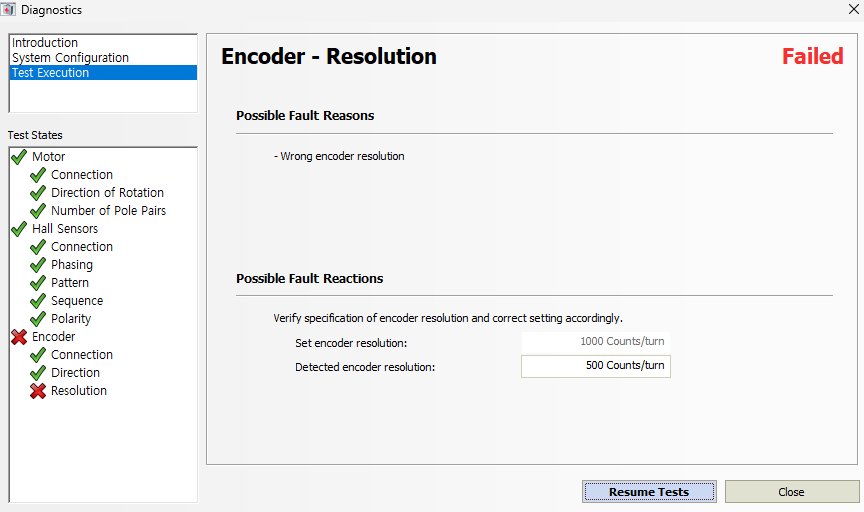
Set encoder resolution: 1000 Counts/turn
Detected encoder resolution: 500 Counts/turn
정확히 절반이다. 이 패턴은 엔코더 사양 표기의 혼용에서 온다.
“2CH 1000CPR"이라는 스펙 문구는 해석이 여러 가지 가능하다.
| 해석 | 엔코더 슬릿 수 | ESCON 입력값 |
|---|---|---|
| 채널당 1000 펄스 | 1000 | 1000 |
| 2채널 합계 1000 펄스 | 500 | 500 |
| 4체배 후 1000 카운트 | 250 | 250 |
BL57101E1K는 두 번째 해석에 해당한다. 엔코더 디스크에 500개 슬릿이 있고 A채널 500 + B채널 500 = 합계 1000으로 표기한 것. 중국 OEM 관행에서 흔한 방식이다.
Detected 값 500 그대로 적용하고 Resume.
All Tests Passed
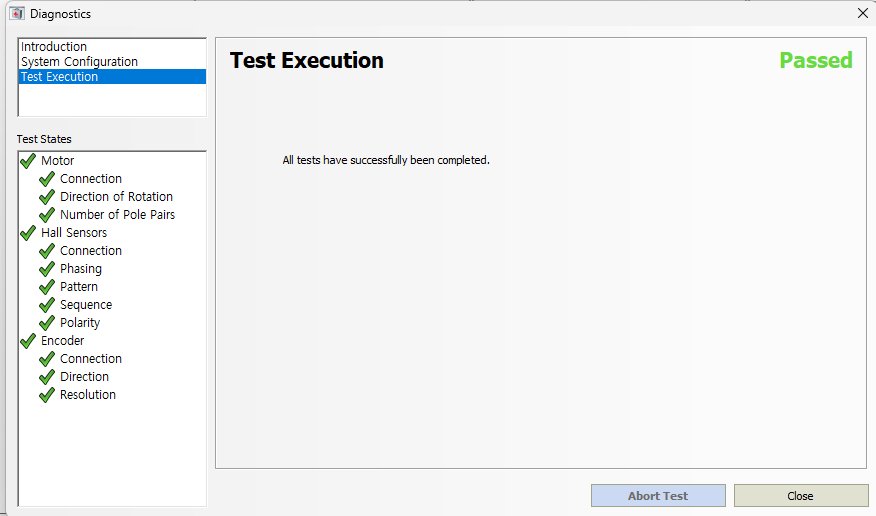
11개 항목 모두 통과.
Motor: 3/3 Pass
Hall Sensors: 5/5 Pass
Encoder: 3/3 Pass
Hall Sensors 5개가 한 번에 붙은 건 좀 운이 좋았다. BL57101E1K의 Hall 배치가 maxon 표준(120°)과 그대로 호환된다는 얘기다.
Diagnostics로 확정된 설정값
| 항목 | 초기값 | 최종값 | 변경 사유 |
|---|---|---|---|
| Pole Pairs | 4 | 2 | ESCON 실측 |
| Motor Polarity | maxon | Software corrected | 국산 모터 특성 |
| Encoder Resolution | 1000 | 500 Counts/turn | 사양서 표기 차이 |
| Encoder Direction | maxon | Software corrected | Motor 보정의 연쇄 |
| Hall Polarity | maxon | maxon (유지) | 호환 확인 |
Auto Tuning
Diagnostics 끝났으니 Regulation Tuning → Auto Tuning 실행.
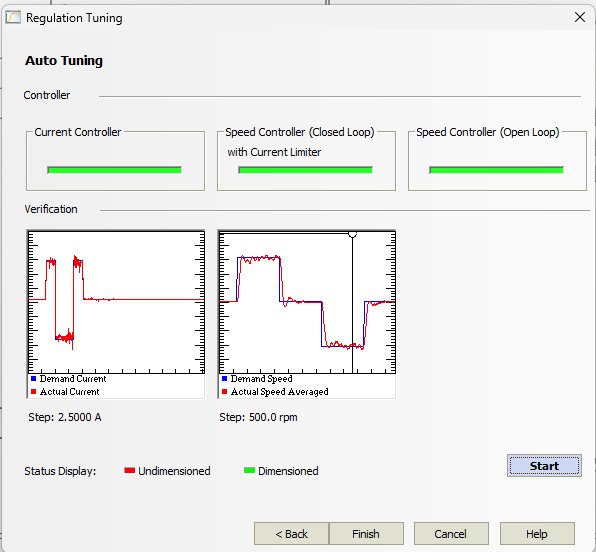
세 개의 제어 루프 모두 Dimensioned로 떴다.
Current Controller : Dimensioned
Speed Controller (Closed Loop) : Dimensioned
with Current Limiter
Speed Controller (Open Loop) : Dimensioned
왼쪽 Current Loop 그래프는 2.5A 스텝에 대해 명령(파란선)을 실측(빨간선)이 거의 그대로 따라간다. Rise time 수 ms 이내, 오실레이션도 빠르게 수렴. 전류 루프 대역폭은 대략 1 kHz 정도로 보인다.
오른쪽 Speed Loop는 +500 / -500 / 0 rpm 양방향 스텝 응답이다. Overshoot 5% 이내, Settling time 100 ms 이내, Steady-state error 거의 0. CW/CCW 대칭성도 괜찮다. 일반 산업 응용엔 이 정도면 충분하다.
최종 설정값 요약
Startup Wizard 입력값
| 화면 | 항목 | 값 |
|---|---|---|
| Motor Data | Speed Constant | 149.9 rpm/V |
| Thermal Time Constant | 4.0 s | |
| Pole Pairs | 2 (Diagnostics 후) | |
| System Data | Max. Permissible Speed | 3000 rpm |
| Nominal Current | 5.0 A | |
| Max. Output Current | 10.0 A | |
| Rotor Position | Sensor | Digital Hall Sensors |
| Polarity | maxon | |
| Speed Sensor | Sensor | Digital Incremental Encoder |
| Resolution | 500 Counts/turn (Diagnostics 후) | |
| Direction | maxon (소프트웨어 보정) | |
| Mode | Operation | Speed Controller (Closed Loop) |
| Enable | Mode | Enable & Direction (DI2/DI3) |
| Set Value | Type | PWM Set Value (DI1) |
| Speed at 10% | 0 rpm | |
| Speed at 90% | 3000 rpm | |
| Current Limit | Fixed | 10 A |
| Speed Ramp | Acc / Dec | 1000 / 1000 rpm/s |
| Offset | Fixed | 0 rpm |
| AO1 | Actual Speed | 0V=0rpm / 3.3V=3000rpm |
| AO2 | Actual Current | 0V=0A / 3.3V=10A |
배선 요약
[STM32 MCU] [ESCON 50/5]
TIM_CHx (PWM) ────> Digital Input 1
GPIO (Enable) ────> Digital Input 2
GPIO (Direction) ────> Digital Input 3
ADC1 <──── Analog Output 1 (Speed)
ADC2 <──── Analog Output 2 (Current)
GND ──── Signal GND
[전원]
+24V DC 15A ────> +V Power
GND ────> Power GND
[모터 BL57101E1K] [ESCON 50/5]
U / V / W Motor U/V/W
Hall +5V/GND/H1/H2/H3 Hall Sensor 5핀
Enc +5V/GND/A/B Encoder 4핀
정리하면
이번 건에서 건진 게 대충 네 가지다.
사양서를 100% 믿지 말 것. “8 Poles"가 4 pole pairs일 거라 넣었는데 실제는 2 pole pairs, “1000 CPR"도 채널당 1000이 아니라 합계 1000이었다. 다음부터 엔코더 구매할 땐 “디스크 슬릿이 정확히 몇 개인가"를 업체에 직접 물어봐야 한다.
Diagnostics가 사양서 오류까지 잡아 준다는 점이 ESCON의 진짜 가치라고 본다. Startup Wizard 끝나고 바로 Auto Tuning 돌리는 유혹이 있는데, Diagnostics를 먼저 돌리지 않으면 뒤에서 더 크게 꼬인다.
소프트웨어 보정이 배선 교체보다 낫다. 국산 BLDC는 대부분 극성/방향이 maxon 표준과 다른데, 배선을 뜯어 바꾸는 건 실수 유발 요소가 너무 많다. Diagnostics가 제안하는 소프트웨어 보정을 일관되게 쓰면 설정 파일에 기록되고 나중에 재현도 쉽다.
PWM Set Value는 임베디드 친화적이지만 저속에서 리플은 주의. MCU에서 DAC 없이 속도 제어가 된다는 건 편한데, 저속 구간에선 PWM 리플 때문에 미세 떨림이 올라올 수 있다. 10%/90% 엔드포인트로 Fail-safe도 같이 잡아 두는 게 좋다.
다음에 할 것
- 파라미터 파일(.edc) 저장하고 깃에 커밋
- STM32 쪽에 PWM + Enable + Direction 제어 로직 얹기
- ADC로 AO1/AO2 읽어 속도/전류 모니터링
- Data Recorder로 부하 걸린 상태의 응답 측정
- 필요하면 Expert Tuning에서 Controller Stiffness 손보기
STM32 쪽 제어 로직 얹는 건 다음 포스트에서 다룬다.