쿨롱 카운팅은 시간 지나면 오차가 누적된다. 전류 센서 오차, 샘플링 오차.
칼만 필터로 OCV 측정값이랑 융합하면 정확도가 올라간다.
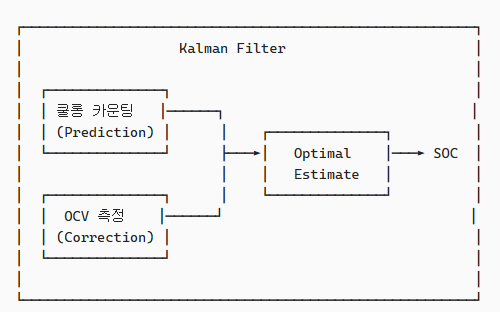
칼만 필터 기초
예측 → 보정 반복.
예측: 이전 상태 + 입력으로 다음 상태 예측
보정: 측정값으로 예측 보정
SOC 추정에 적용:
- 예측: 쿨롱 카운팅 (전류 적분)
- 보정: OCV 측정
단순화된 구현
EKF(Extended Kalman Filter)가 정석이지만 복잡하다.
단순화 버전:
typedef struct {
float soc; // 상태 (SOC)
float P; // 오차 공분산
float Q; // 프로세스 노이즈
float R; // 측정 노이즈
} KalmanFilter_t;
KalmanFilter_t kf = {
.soc = 50.0f,
.P = 1.0f,
.Q = 0.001f, // 쿨롱 카운팅 신뢰도
.R = 10.0f // OCV 측정 신뢰도
};
예측 단계
쿨롱 카운팅으로 예측:
void KF_Predict(float current_a, float dt) {
// 상태 예측: SOC -= I * dt / Capacity
float dsoc = current_a * dt / (g_bms.capacity_ah * 3600) * 100;
kf.soc -= dsoc;
// 오차 공분산 증가
kf.P += kf.Q;
// 범위 제한
if (kf.soc > 100) kf.soc = 100;
if (kf.soc < 0) kf.soc = 0;
}
보정 단계
OCV 측정값으로 보정:
void KF_Update(float measured_soc) {
// 칼만 게인
float K = kf.P / (kf.P + kf.R);
// 상태 보정
kf.soc += K * (measured_soc - kf.soc);
// 오차 공분산 감소
kf.P *= (1 - K);
}
전체 흐름
void SOC_KalmanUpdate(void) {
float current_a = g_bms.pack_current_ma / 1000.0f;
float dt = 0.1f; // 100ms
// 예측 (항상)
KF_Predict(current_a, dt);
// 보정 (휴지 시에만)
if (fabsf(current_a) < 0.5f && g_bms.rest_time > 60) {
float soc_ocv = OCV_LookupSOC(g_bms.avg_cell_mv);
KF_Update(soc_ocv);
}
g_bms.soc = (uint8_t)kf.soc;
}
파라미터 튜닝
Q와 R 비율이 중요하다.
Q 크면: 쿨롱 카운팅 안 믿음, OCV에 빨리 수렴
R 크면: OCV 안 믿음, 쿨롱 카운팅 위주
LFP처럼 OCV가 평평하면 R을 크게:
// NMC
kf.Q = 0.001f;
kf.R = 5.0f;
// LFP
kf.Q = 0.0001f;
kf.R = 50.0f; // OCV 신뢰도 낮춤
테스트 결과
단순 쿨롱 카운팅: 오차 5~10%
칼만 필터 적용: 오차 2~3%
특히 장시간 사용 후 오차 누적이 줄어든다.
정리
- 예측: 쿨롱 카운팅
- 보정: OCV 측정 (휴지 시)
- Q/R 비율로 각 측정 신뢰도 조절
- LFP는 OCV 신뢰도 낮게
구현은 단순한데 효과는 좋다.
다음은 프리차지 회로.